 |
RCL - RoboCLuedo
v1.0
Francesco Ganci - S4143910 - Experimental Robotics Lab - Assignment 1
|
|
RCL - RoboCLuedo
v1.0
Francesco Ganci - S4143910 - Experimental Robotics Lab - Assignment 1
|
The main FSM of RCL. More...
Go to the source code of this file.
Data Structures | |
| class | robocluedo_main.robocluedo_random_target |
| implementation of the state random_target. More... | |
| class | robocluedo_main.robocluedo_moving |
| implementation of the state moving. More... | |
| class | robocluedo_main.robocluedo_listening_for_hints |
| implementation of the state listening_for_hints. More... | |
| class | robocluedo_main.robocluedo_update_ontology |
| implementation of the state update_ontology. More... | |
| class | robocluedo_main.robocluedo_reasoning |
| implementation of the state reasoning. More... | |
| class | robocluedo_main.robocluedo_charge |
| implementation of the state charge. More... | |
Namespaces | |
| robocluedo_main | |
Functions | |
| def | robocluedo_main.listen_for_hints (data) |
| listen for a hint from the oracle, then buffer it More... | |
| def | robocluedo_main.create_state_machine () |
| define the state machine of the robot before starting More... | |
Variables | |
| bool | robocluedo_main.hint_received = False |
| is there any message from the oracle? More... | |
| robocluedo_main.hint = None | |
| the message from the oracle, if any More... | |
| string | robocluedo_main.target = "" |
| target to be 'consumed' by 'robocluedo_moving' More... | |
| string | robocluedo_main.actual_position = "" |
| actual position of the robot (string, the room) More... | |
| bool | robocluedo_main.charge_ready = False |
| is the charge ready? More... | |
| robocluedo_main.charge = None | |
| a possible solution to be confirmed or discarded, if any More... | |
| string | robocluedo_main.hypothesis_tag = "" |
| teh tag of the actual hypothesis More... | |
The main FSM of RCL.
Description:
The main part of this architecture is the FSM implemented in this node, which uses the ROS framework smach. See the diagrams to understand how this node works.
this node has been implemented thinking on the maximum flexibility: the way it works can be easily extended or integrated with other components with small, or also absent, changes.
UML component
(See RoboCLuedo – COMP – UML Components Diagram the overal architecture, for further informations)
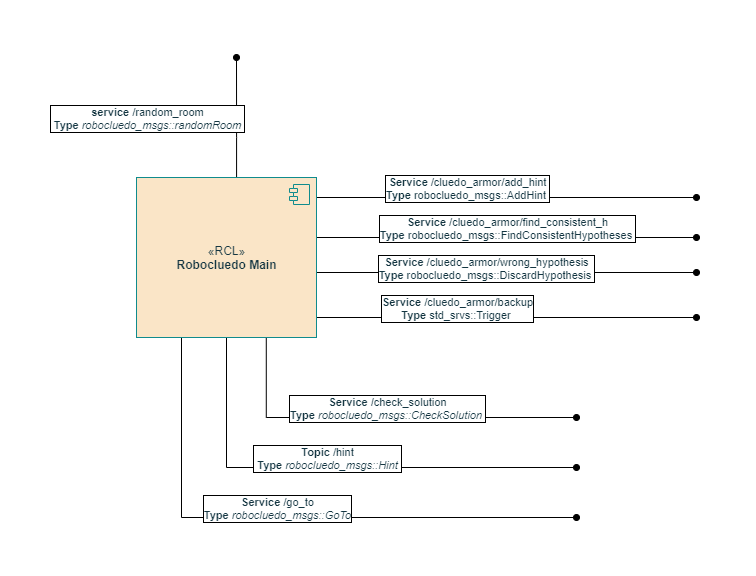
Subscribers:
Clients:
Definition in file robocluedo_main.py.
 1.8.17
1.8.17