 |
RCL - RoboCLuedo
v1.0
Francesco Ganci - S4143910 - Experimental Robotics Lab - Assignment 1
|
|
RCL - RoboCLuedo
v1.0
Francesco Ganci - S4143910 - Experimental Robotics Lab - Assignment 1
|
Dedicated RobotCLuedo-aRMOR client. More...
#include "ros/ros.h"#include "armor_tools/armor_tools.h"#include "armor_tools/armor_cluedo.h"#include "std_srvs/Trigger.h"#include "armor_msgs/ArmorDirective.h"#include "armor_msgs/ArmorDirectiveList.h"#include "armor_msgs/ArmorDirectiveReq.h"#include "armor_msgs/ArmorDirectiveRes.h"#include "armor_msgs/QueryItem.h"#include "robocluedo_msgs/AddHint.h"#include "robocluedo_msgs/Hypothesis.h"#include "robocluedo_msgs/FindConsistentHypotheses.h"#include "robocluedo_msgs/DiscardHypothesis.h"#include <iostream>#include <fstream>#include <string>#include <vector> Include dependency graph for cluedo_armor_interface.cpp:
Include dependency graph for cluedo_armor_interface.cpp:Go to the source code of this file.
Macros | |
| #define | SERVICE_INTERFACE_ADD_HINT "/cluedo_armor/add_hint" |
| #define | SERVICE_INTERFACE_FIND_CONSISTENT_HYP "/cluedo_armor/find_consistent_h" |
| #define | SERVICE_INTERFACE_WRONG_HYPOTHESIS "/cluedo_armor/wrong_hypothesis" |
| #define | SERVICE_INTERFACE_SAVE_ONTOLOGY "/cluedo_armor/backup" |
| #define | ONTOLOGY_PARAM "cluedo_path_owlfile" |
| #define | PARAM_ONTOLOGY_BACKUP_PATH "cluedo_path_owlfile_backup" |
| #define | OUTLABEL "[cluedo_armor_interface]" |
| #define | OUTLOG(msg) ROS_INFO_STREAM( OUTLABEL << " " << msg ); |
| #define | LOGSQUARE(str) "[" << str << "] " |
| #define | SS(this_string) std::string( this_string ) |
| #define | SSS(this_thing) std::to_string( this_thing ) |
Functions | |
| std::vector< std::string > | PerformDifferenceBetween (std::vector< std::string > list1, std::vector< std::string > list2) |
| delete all the occurrences of list2 inside list1 More... | |
| bool | ServiceAddHint (robocluedo_msgs::AddHint::Request &hint, robocluedo_msgs::AddHint::Response &success) |
| implementation of service SERVICE_INTERFACE_ADD_HINT More... | |
| bool | ServiceFindConsistentHypotheses (robocluedo_msgs::FindConsistentHypotheses::Request &empty, robocluedo_msgs::FindConsistentHypotheses::Response &hyplist) |
| implementation of service SERVICE_INTERFACE_FIND_CONSISTENT_HYP More... | |
| bool | DiscardHypothesis (robocluedo_msgs::DiscardHypothesis::Request &tag, robocluedo_msgs::DiscardHypothesis::Response &success) |
| implementation of service SERVICE_INTERFACE_WRONG_HYPOTHESIS More... | |
| bool | ServiceBackupOntology (std_srvs::Trigger::Request &emptyrequest, std_srvs::Trigger::Response &success) |
| implementation of service SERVICE_INTERFACE_SAVE_ONTOLOGY More... | |
| int | main (int argc, char *argv[]) |
| ROS node main. More... | |
Dedicated RobotCLuedo-aRMOR client.
Description:
This node implements an inferface which simplifies and abstracts the communication with the aRMOR service, with particular attention to the most common operations performed by RCL during the search of a solution.
UML components
(See RoboCLuedo – COMP – UML Components Diagram the overal architecture, for further informations)
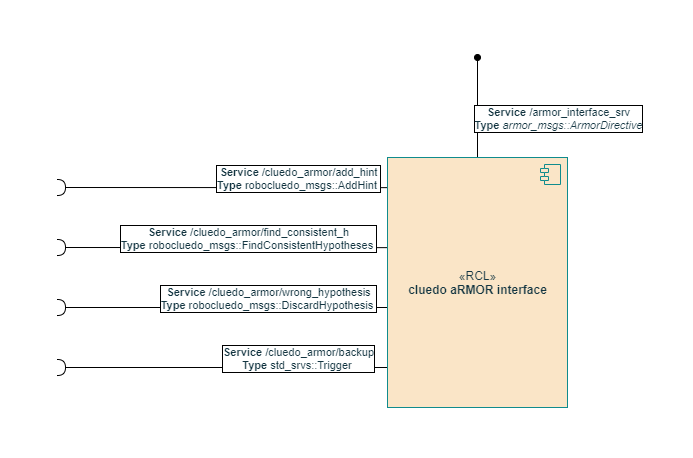
Services:
Hidden services and topics
Parameters:
Definition in file cluedo_armor_interface.cpp.
 1.8.17
1.8.17 