 |
RCL - RoboCLuedo
v1.0
Francesco Ganci - S4143910 - Experimental Robotics Lab - Assignment 1
|
|
RCL - RoboCLuedo
v1.0
Francesco Ganci - S4143910 - Experimental Robotics Lab - Assignment 1
|
The referee of the game. More...
#include "ros/ros.h"#include "std_msgs/Empty.h"#include "robocluedo_msgs/Hint.h"#include "robocluedo_msgs/CheckSolution.h"#include <vector>#include <string>#include <random>#include <fstream>#include <algorithm> Include dependency graph for cluedo_oracle.cpp:
Include dependency graph for cluedo_oracle.cpp:Go to the source code of this file.
Macros | |
| #define | PUBLISHER_HINT "/hint" |
| #define | SUBSCRIBER_HINT_SIGNAL "/hint_signal" |
| #define | SERVICE_CHECK_SOLUTION "/check_solution" |
| #define | PATH_PARAMETER_SERVER_WHERE "cluedo_path_where" |
| #define | PATH_PARAMETER_SERVER_WHO "cluedo_path_who" |
| #define | PATH_PARAMETER_SERVER_WHAT "cluedo_path_what" |
| #define | MAX_NUM_HINTS 2 |
| default maximum number of hint IDs More... | |
| #define | MAX_SIZE_HINT 10 |
| maximum number of hints inside each ID More... | |
| #define | OUTLABEL "[cluedo_oracle] " |
| #define | OUTLOG(msg) ROS_INFO_STREAM( OUTLABEL << msg ) |
| #define | OUTERR(msg) OUTLOG( "ERROR: " << msg ) |
| #define | LOGSQUARE(str) "[" << str << "] " |
Functions | |
| bool | importDataFrom (std::string path, std::vector< std::string > &list) |
| import entities from file More... | |
| std::string | chooseHintFrom (std::vector< std::string > &list) |
| choose randomly a hint from a list More... | |
| void | hintCallback (const std_msgs::EmptyConstPtr &emptySignal) |
| subscriber to SUBSCRIBER_HINT_SIGNAL and publisher of PUBLISHER_HINT More... | |
| bool | checkSolutionCallback (robocluedo_msgs::CheckSolution::Request &hyp, robocluedo_msgs::CheckSolution::Response &misterySolved) |
| implementation of service SERVICE_CHECK_SOLUTION More... | |
| void | generateMystery (std::vector< std::string > list_who, std::vector< std::string > list_where, std::vector< std::string > list_what, int tot_hints) |
| generate the solution of the case and the hints More... | |
| int | main (int argc, char *argv[]) |
| ROS node main - cluedo_oracle. More... | |
Variables | |
| std::vector< std::string > | hints_who |
| vector of hints - who More... | |
| std::vector< std::string > | hints_where |
| vector of hints - where More... | |
| std::vector< std::string > | hints_what |
| vector of hints - what More... | |
| robocluedo_msgs::Hint | solution_who |
| SOLUTION - who killed Dr Black. More... | |
| robocluedo_msgs::Hint | solution_where |
| SOLUTION - where Dr Black was killed. More... | |
| robocluedo_msgs::Hint | solution_what |
| SOLUTION - what's the murder weapon. More... | |
| std::vector< robocluedo_msgs::Hint > | mysterylist |
| shuffled list of hypotheses More... | |
The referee of the game.
Description:
This node implements a referee for the game: it prepares the hints and the mystery, then sends the hints to the robot and checks the hypotheses from the robot.
UML component
(See RoboCLuedo – COMP – UML Components Diagram the overal architecture, for further informations)
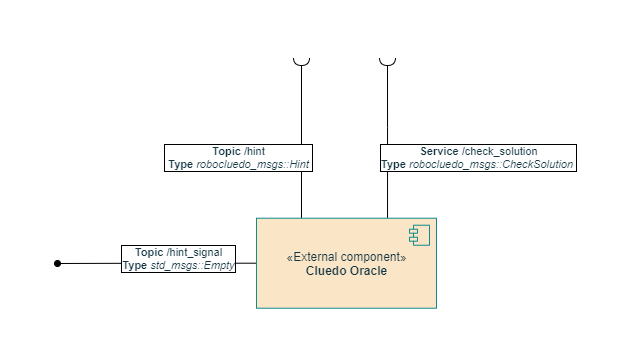
Publishers:
Subscribers:
Services:
Parameters:
Definition in file cluedo_oracle.cpp.
 1.8.17
1.8.17 