|
RCL - RoboCLuedo
v1.0
Francesco Ganci - S4143910 - Experimental Robotics Lab - Assignment 1
|
|
RCL - RoboCLuedo
v1.0
Francesco Ganci - S4143910 - Experimental Robotics Lab - Assignment 1
|
stub ROS node, movement controller More...
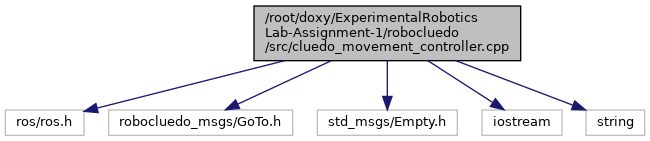
#include "ros/ros.h"#include "robocluedo_msgs/GoTo.h"#include "std_msgs/Empty.h"#include <iostream>#include <string> Include dependency graph for cluedo_movement_controller.cpp:
Include dependency graph for cluedo_movement_controller.cpp:Go to the source code of this file.
Macros | |
| #define | SERVICE_GO_TO "/go_to" |
| #define | PUBLISHER_HINT_SIGNAL "/hint_signal" |
| #define | OUTLABEL "[cluedo_movement_controller]" |
| #define | OUTLOG std::cout << OUTLABEL << " " |
| #define | LOGSQUARE(str) "[" << str << "] " |
Functions | |
| bool | GoToCallback (robocluedo_msgs::GoTo::Request &where, robocluedo_msgs::GoTo::Response &success) |
| implementation of service SERVICE_INTERFACE_FIND_CONSISTENT_HYP More... | |
| int | main (int argc, char *argv[]) |
| ROS node main - cluedo_movement_controller. More... | |
stub ROS node, movement controller
Description:
It represents the 'act' part inside the behavioural architecture. Actually it doesn't do anything: it is a 'wait' which can signal the Oracle (as a laser sensor when the robot enters in a room). In future, it should become a path planning facility.
UML component
(See RoboCLuedo – COMP – UML Components Diagram the overal architecture, for further informations)
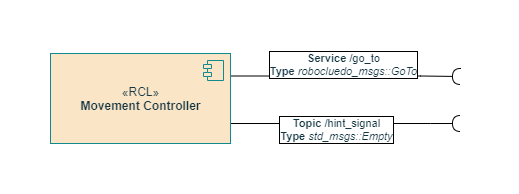
Publishers:
Services:
Definition in file cluedo_movement_controller.cpp.
 1.8.17
1.8.17