 |
RCL - RoboCLuedo
v1.0
Francesco Ganci - S4143910 - Experimental Robotics Lab - Assignment 1
|
|
RCL - RoboCLuedo
v1.0
Francesco Ganci - S4143910 - Experimental Robotics Lab - Assignment 1
|
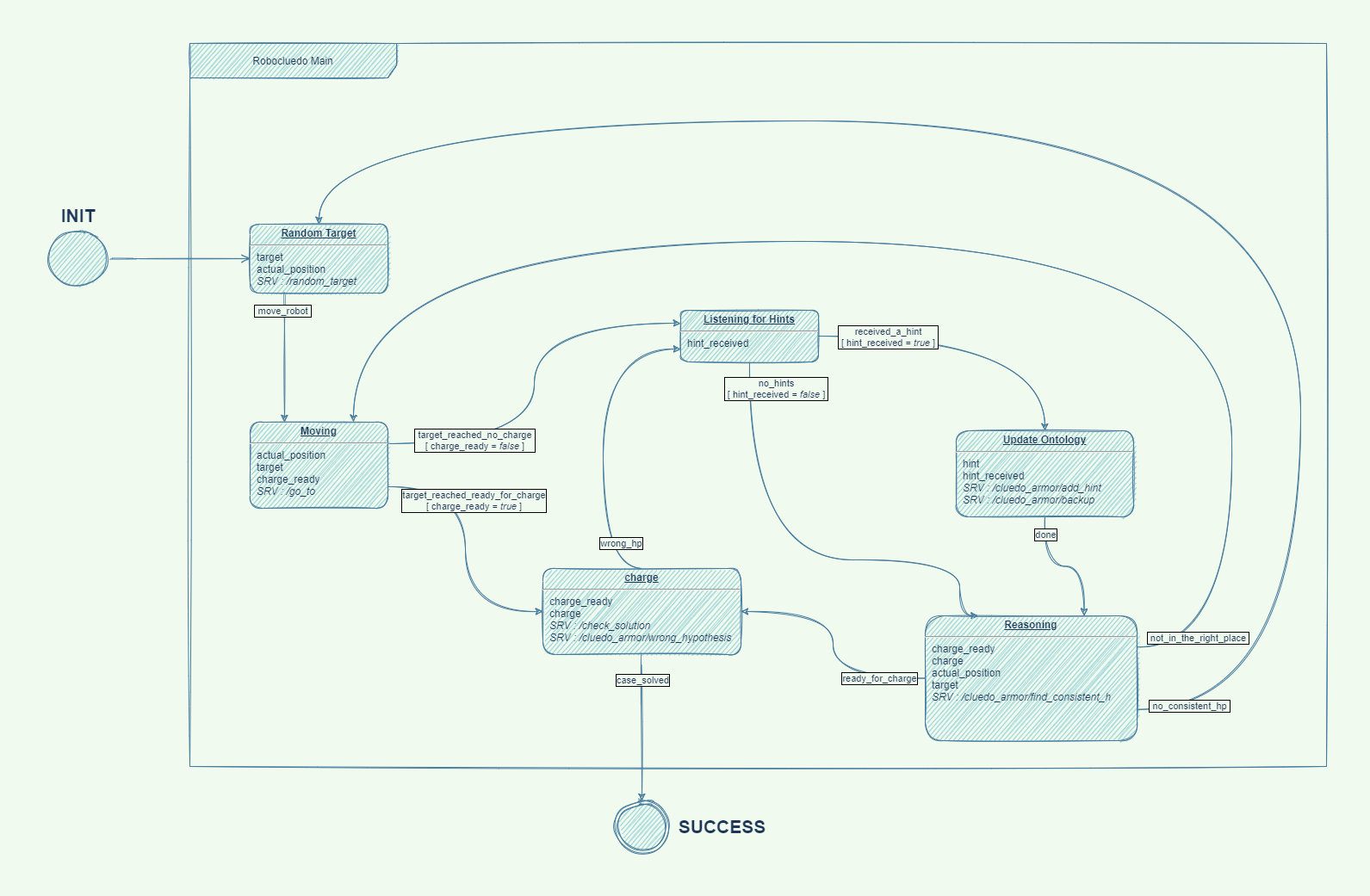
The UML FSM diagram
This diagram represents the behaviour implemented in the ROS node robocluedo_main.py . Please take into account the followings:
 1.8.17
1.8.17