|
RCL - RoboCLuedo
v1.0
Francesco Ganci - S4143910 - Experimental Robotics Lab - Assignment 1
|
|
RCL - RoboCLuedo
v1.0
Francesco Ganci - S4143910 - Experimental Robotics Lab - Assignment 1
|
| armor_msgs::ArmorDirective ArmorTools::GetRequest | ( | std::string | command, |
| std::string | first_spec = "", |
||
| std::string | second_spec = "", |
||
| std::string | arg1 = "", |
||
| std::string | arg2 = "", |
||
| std::string | arg3 = "", |
||
| std::string | arg4 = "", |
||
| std::string | arg5 = "" |
||
| ) |
quick generation of an aRMOR request
This function writes the aRMOR directive request in one shot.
| command | (mandatory) the main command |
| first_spec | (optional) the first specifier |
| second_spec | (optional) the second specifier |
| arg | (optional) (from 1 to 5) the arguments of the request |
Definition at line 82 of file armor_tools.cpp.
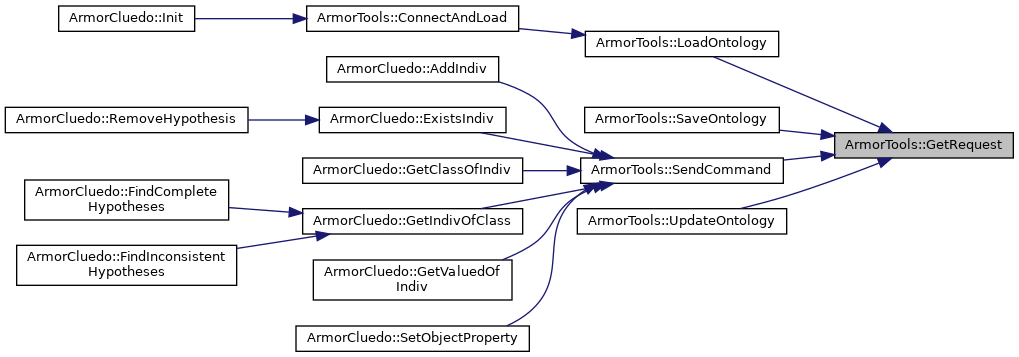
Referenced by LoadOntology(), SaveOntology(), SendCommand(), and UpdateOntology().
 Here is the caller graph for this function:
Here is the caller graph for this function: 1.8.17
1.8.17